Developed Robot Description File of a Mars Rover
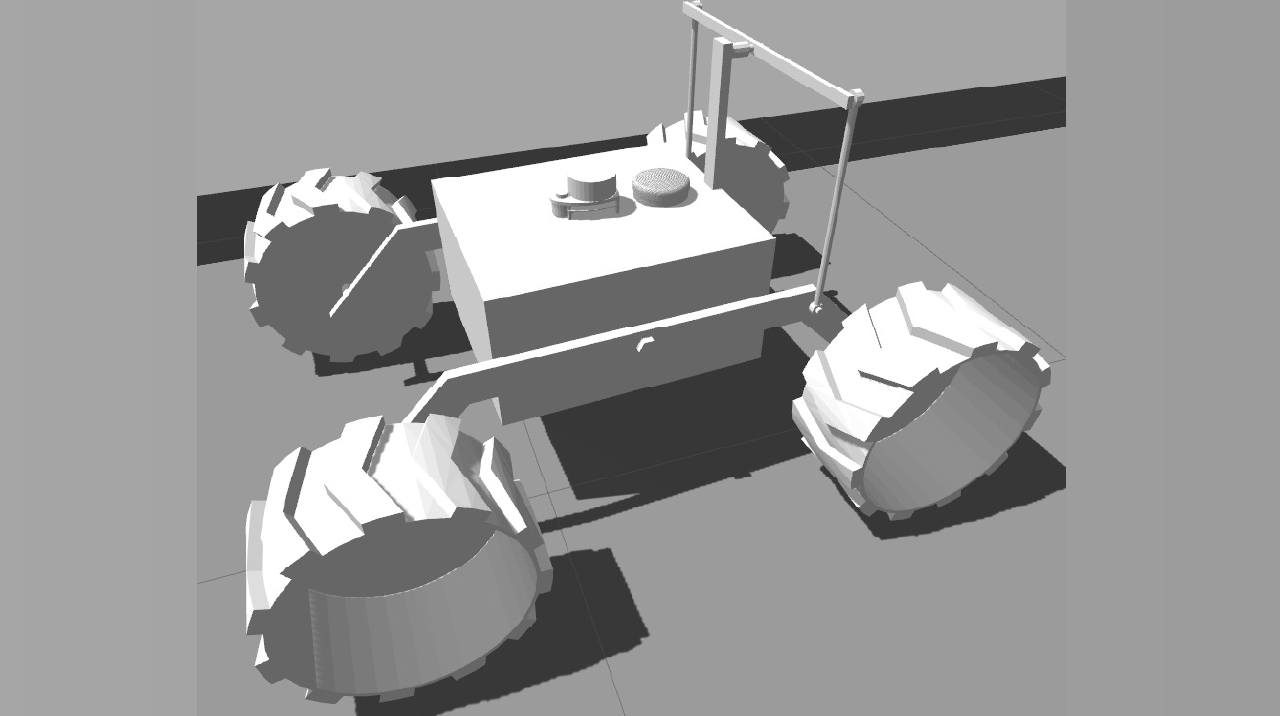


This project represented a key milestone as it was my first practical experience working with ROS. My primary focus was on developing the URDF (Unified Robot Description Format) for a Mars Rover, an essential step in designing and simulating robotic systems capable of navigating and exploring extraterrestrial terrains. The process began with creating the rover's structure using SolidWorks, a robust CAD software ideal for generating precise 3D models. These models were then converted into XACRO (XML Macros), streamlining the URDF design with a more modular and efficient approach.
The URDF included all critical components, such as the wheels, chassis, rocker arm, and a range of sensors required for SLAM (Simultaneous Localization and Mapping). Sensor integration was particularly important, incorporating devices like LIDAR, cameras, and IMUs to enable autonomous mapping, terrain navigation, and spatial stability. This effort provided a virtual representation of the rover's physical design and established a foundation for testing and simulation within the ROS environment. This project significantly enhanced my skills in robot modeling, sensor integration, and simulation, highlighting the importance of detailed robotic descriptions in building reliable autonomous systems.
Description
2020