Autonomous Navigation and Manipulation of LEO Rover with UR3 Arm Simulation
This project was developed as a simulation for the ERC (European Rover Challenge) 2022, focusing on integrating autonomous navigation and manipulation capabilities using the LEO Rover platform equipped with a UR3 robotic arm. The goal was to simulate and refine the rover's ability to perform complex tasks in exploration and manipulation scenarios on Martian-like terrain, preparing for extraterrestrial mission challenges.
Key aspects of the project include:
1. Autonomous Navigation:
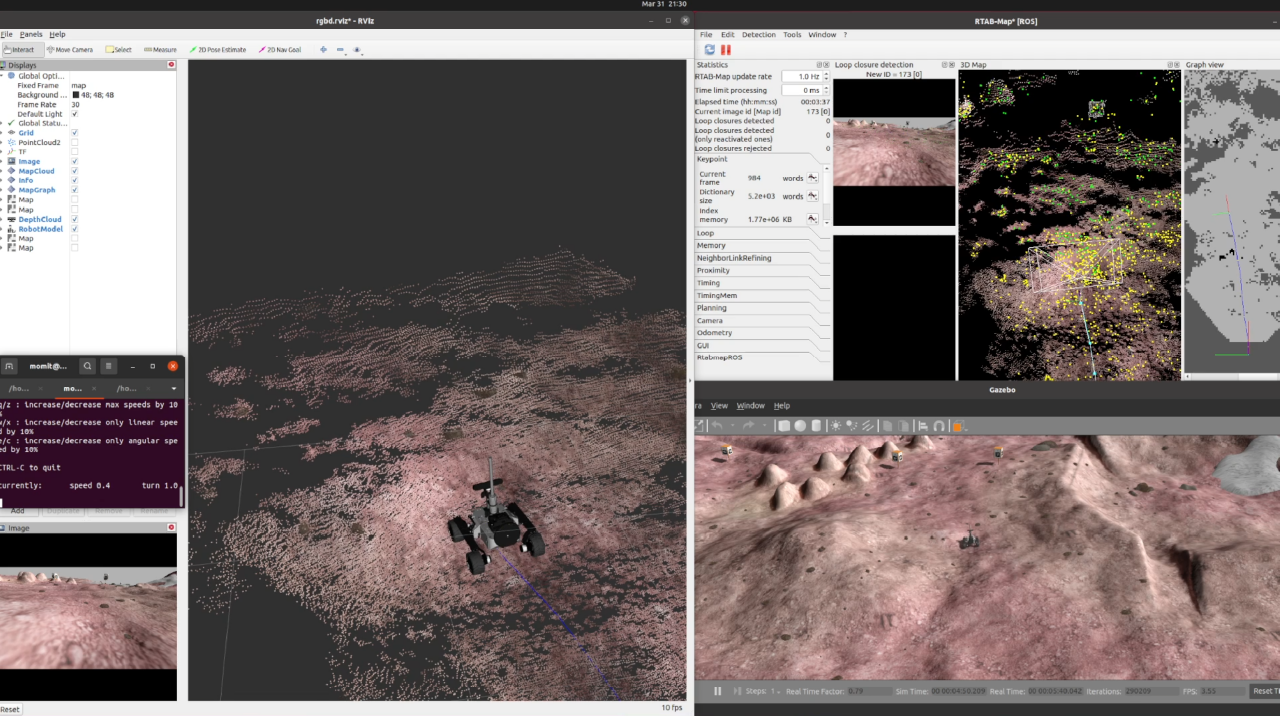
The LEO Rover was equipped with ROS navigation stack, enabling autonomous path planning and obstacle avoidance. Using Zed stereo camera sensors, the system mapped the simulated Martian terrain to achieve accurate localization and smooth navigation over uneven and challenging surfaces.
2. UR3 Arm Control:
The UR3 robotic arm was programmed to execute tasks such as precise object picking, placing, and manipulation. Motion planning was implemented using MoveIt!, allowing seamless trajectory execution while avoiding collisions with obstacles.
3. Simulation Environment:
The entire system was simulated in Gazebo, with a realistic Martian terrain featuring craters, slopes, and rocky surfaces. This environment replicated the conditions and challenges faced during the ERC competition, testing the system’s robustness and adaptability.
This project deepened my understanding of autonomous robotics, multi-degree-of-freedom manipulator control, and the integration of navigation and manipulation systems. It provided critical experience in ROS, motion planning, and simulation tools, showcasing the potential for mobile robotic solutions in extraterrestrial exploration.
Description
2022
This project involved simulating the LEO Rover equipped with a UR3 robotic arm for the ERC 2022 competition, focusing on autonomous navigation and manipulation in Martian-like terrain. Using ROS and MoveIt!
Algorithm Used
- SLAM
- A*
- DWA
- OMPL