State Estimation and Sensor Fusion using Extended Kalman Filter
This project implements an Extended Kalman Filter (EKF) for state estimation in systems with nonlinear process and measurement models. The EKF was used to handle stochastic biases of sensors in a vehicle model, incorporating both linear and nonlinear measurement sources. Specifically:
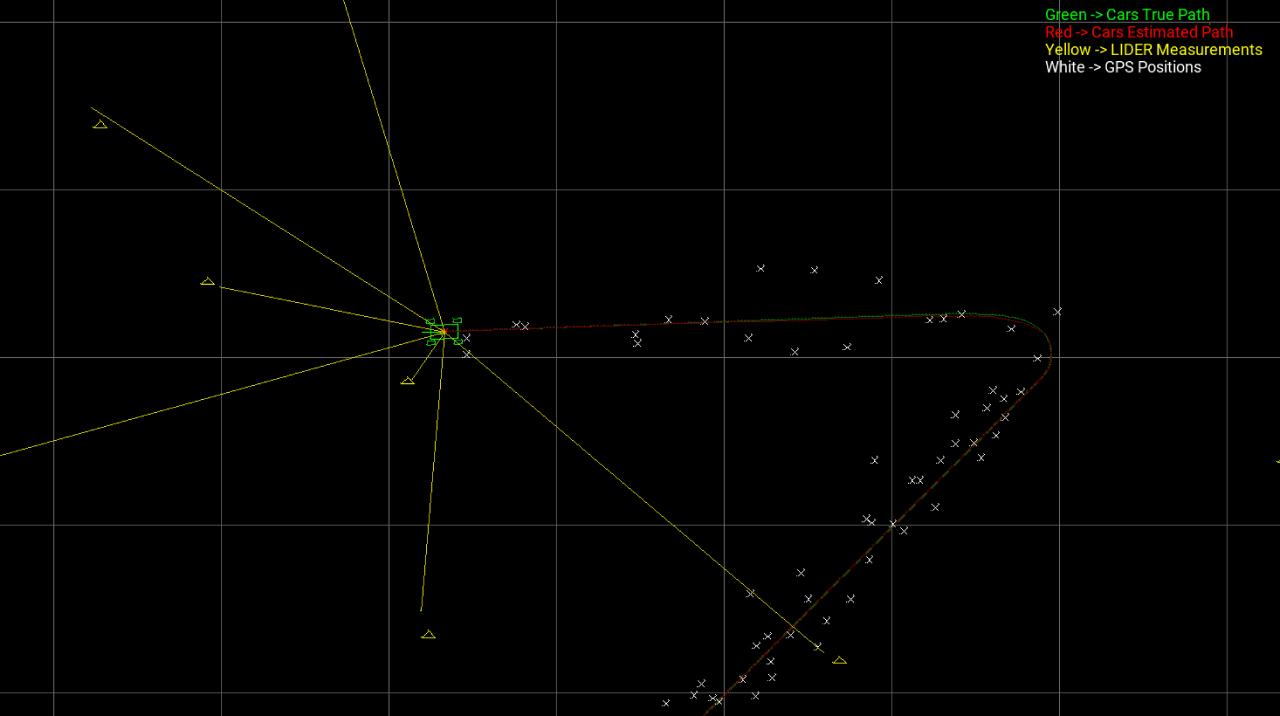
• Nonlinear Measurement Model: Lidar data, with measurements of range and bearing angles, was used to estimate the vehicle's position and orientation also Gyroscope data for orientation.
• Linear Measurement Model: GPS data provided direct position information.
In this demonstration, the vehicle's acceleration was modeled as a random Gaussian noise process with zero mean and a specified variance, rather than accurately representing real-world dynamics.
Description
Designed and simulated a sensor fusion system using Extended Kalman Filtering for enhanced data accuracy.
Algorithm Used
- Extended Kalman Filter (EKF)