Projects
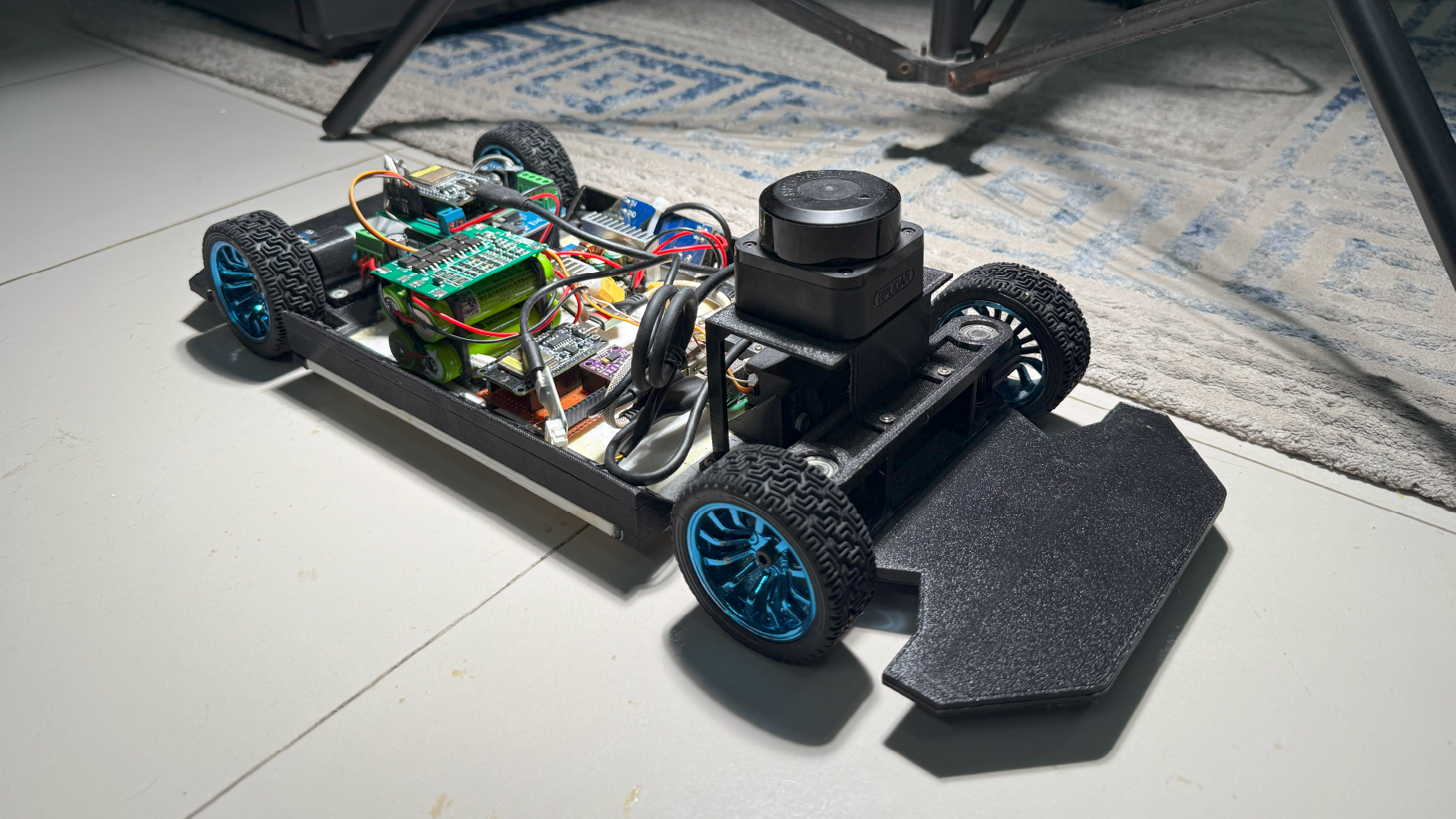
Development of a 1/10 Scale Ackermann Steering Robot with Autonomous Navigation Using ROS 2 and Nav2
Projects
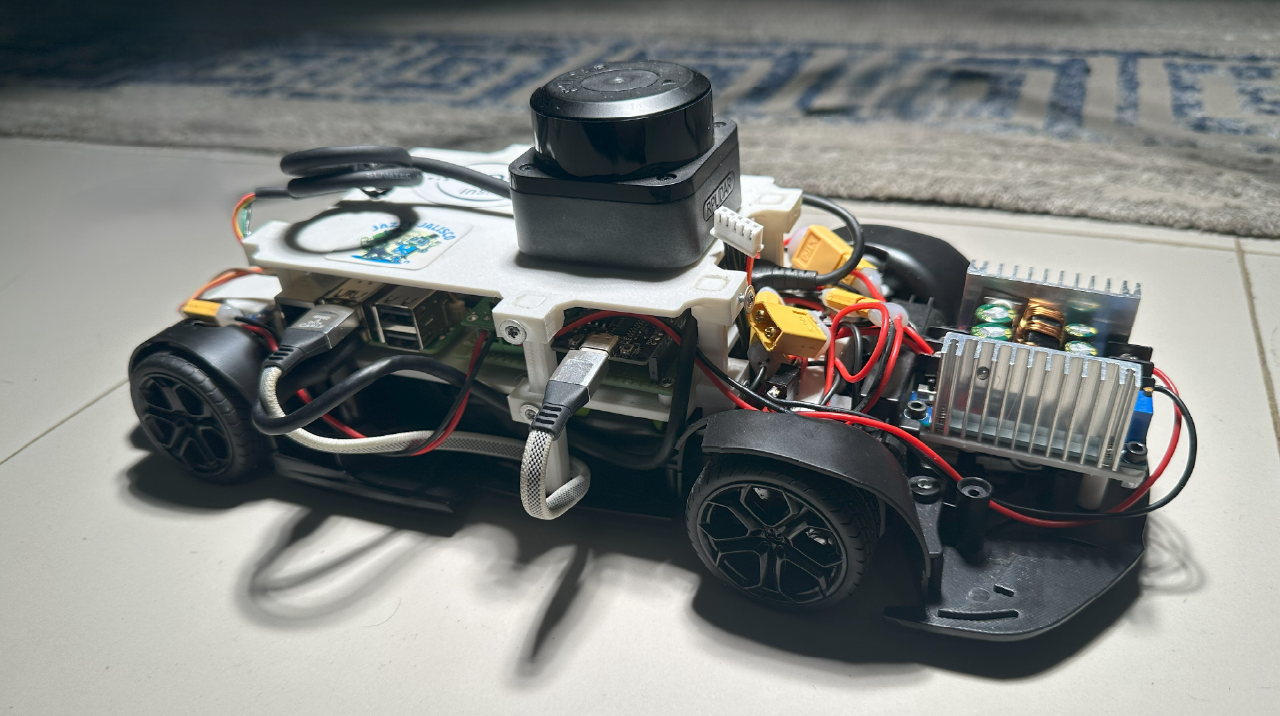
ROS 2-Based Teleoperated Ackermann Vehicle with Custom Mechanical and Electronics Design
Projects
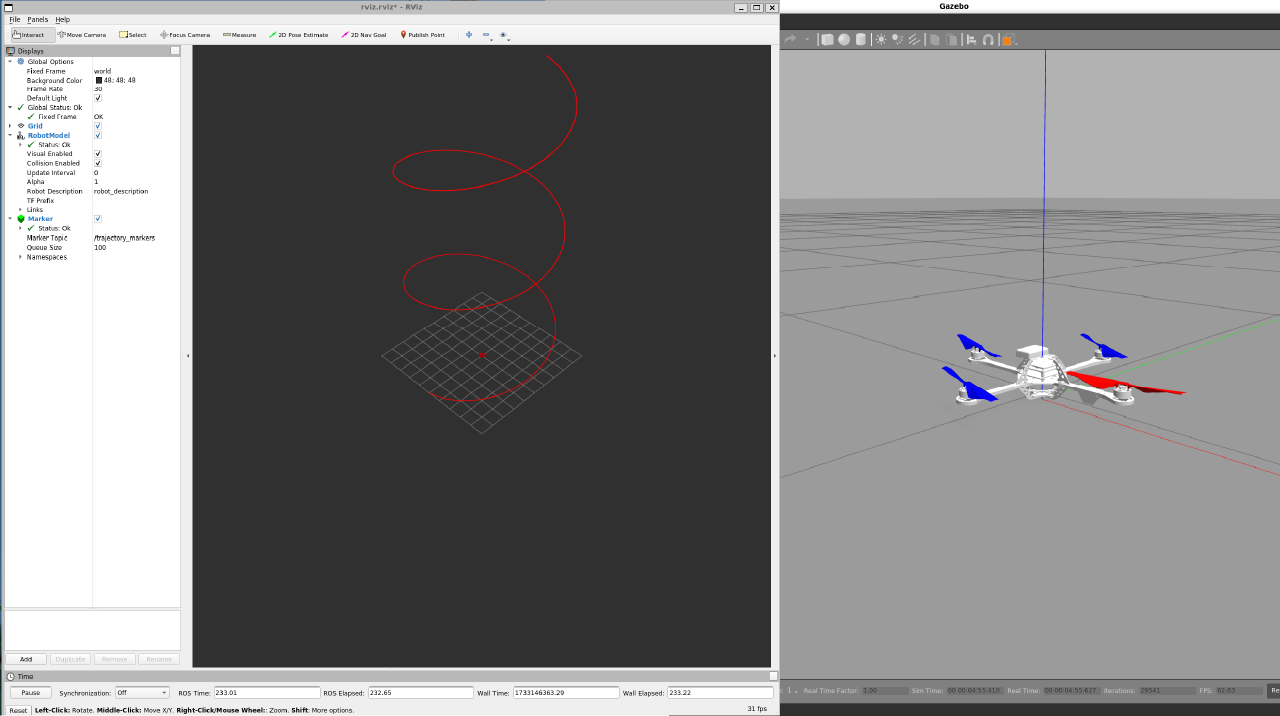
Designing a Robust Model Predictive Controller for UAVs: Implementation and Simulation in ROS/Gazebo
Projects
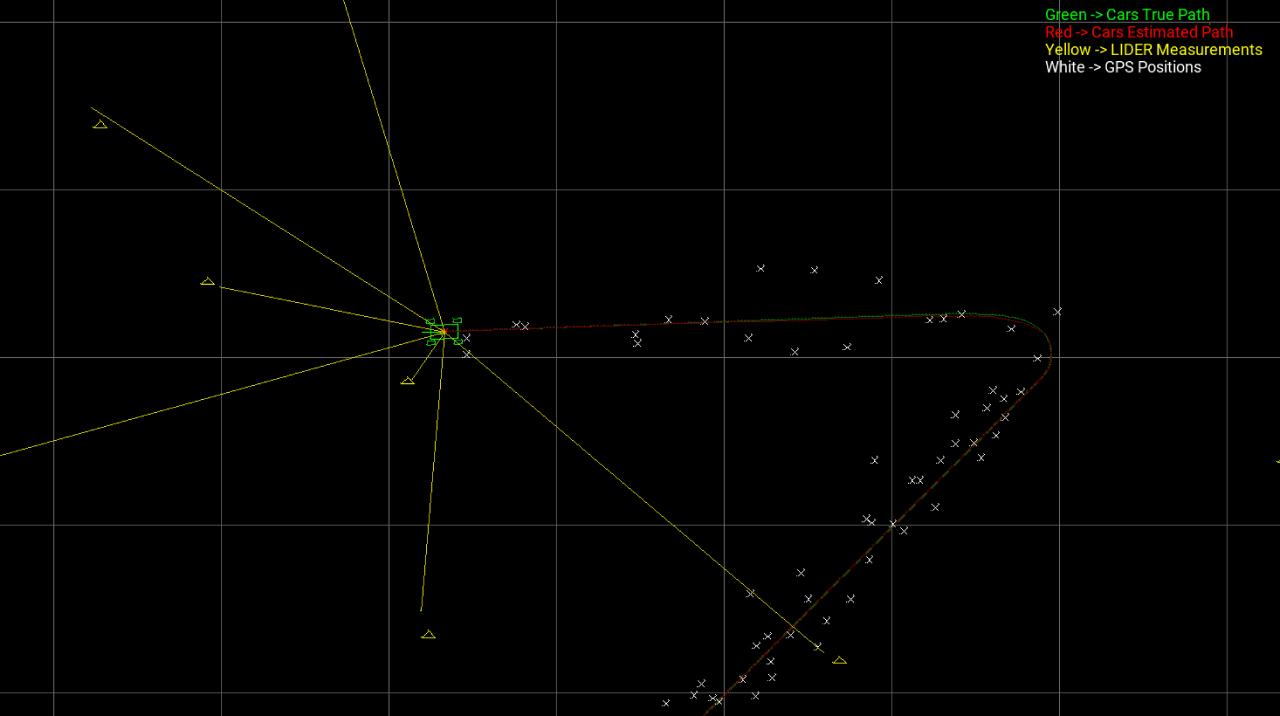
State Estimation and Sensor Fusion using Extended Kalman Filter
Projects
Kilo Flight Alpha – Formula Student Racing Car
Projects
Aeroculture – An IoT and UAV-Based Precision Agriculture system
Projects
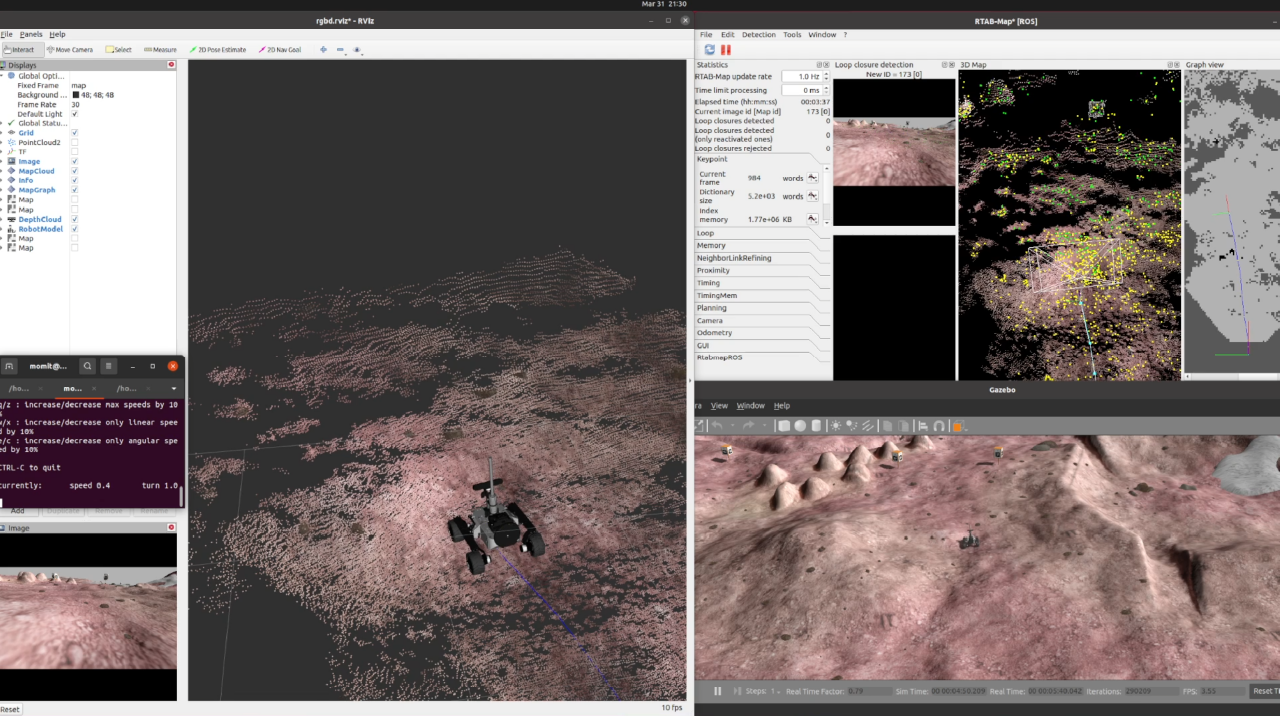
Autonomous Navigation and Manipulation of LEO Rover with UR3 Arm Simulation
Projects
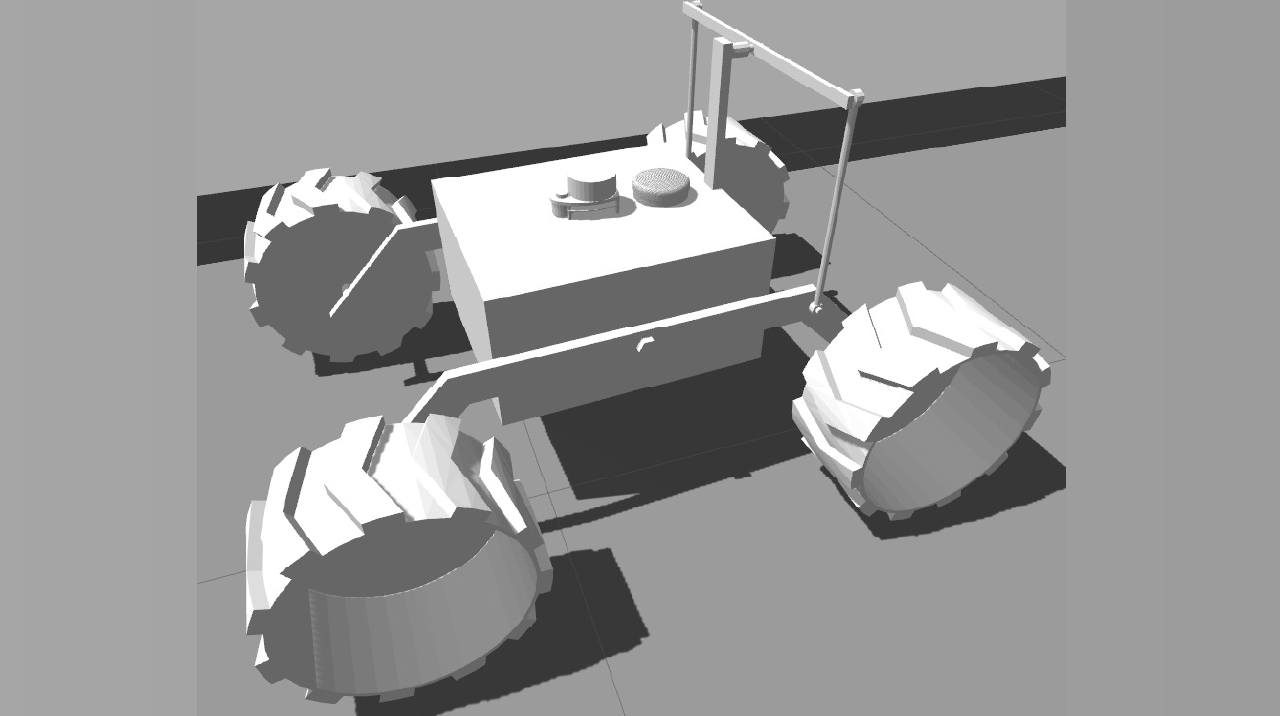
Developed Robot Description File of a Mars Rover
Projects
Autonomous Vehicle Control
Projects